| Embedded TCP/IP an integrating component |  |
ABSTRACT
"The maritime industry needs a modular network building block" is an observation
which
calls for an initiative towards providing a black box denoted as "Embedded
TCP/IP".
Such a device will enable existing and future embedded controllers / intelligent data
acquisition systems to integrate with existing computers connected by means of a
network harnessed by the TCP/IP standard.
Updated by Thor Vollset 18. October 1996
LATEST NEWS - 25. MAI 2000
Internet Messenger -
the optimal combination of tcp/ip and ActiveX
TABLE OF CONTENTS
1 Introduction
2 Related documents
3 Terminology
4 System designs4.1 Typical host based design
4.2 Distributed/Integrated design
4.3 Discussion of architecture
4.4 Conclusion5 The embedded TCP/IP approach
5.1 Back grounder
5.2 Idea behind the embedded controller
5.3 Working example based using TCP/IP6.1 MiTS, Maritime Information Technology Standard
6.2 MiTS Companion Standard
6.3 NMEA over MITS
Introduction
The trend for instrumentation systems in industrial plants or in maritime installations
points towards integration of control systems, monitoring systems and office systems by
means of interconnection through ethernet. The TCP/IP protocol is considered being the
standard for integration of heterogenous computer systems in ethernet based networks.
Whilst TCP/IP support is found on almost any modern computer, it is almost absent in the
world of micro controllers, embedded computers and intelligent data acquisition systems.
This is mainly due to the complexity and cost involved of integrating the required
software and hardware with this type of equipment.
This complexity may be reduced significantly through the introduction of a modular
building block with a clean interface serving the function of providing the stand-alone or
field bus oriented systems with a gateway to a TCP/IP network.
This document proposes such a building block, and presents an overview of the
functionality provided by the device.
TORDIVEL AS is looking for industrial partners with explicit needs for such a device and
defines a budget and a project plan for producing it.
Related documents
1. Internetworking with TCP/IP, Principles, Protocols and Architecture, Volume I, Douglas Comer, Prentice Hall
2. Internetworking with TCP/IP, Design, Implementation and Internals, Volume II, Douglas Comer, Prentice Hall
3. Internetworking with TCP/IP, Client - Server Programming and Applications, Volume III, Douglas Comer, Prentice Hall
4. Companion Standards for integrated ship control system, SINTEF Automatic Control N-7034 TRONDHEIM Norway, Ørnulf Rødseth, 1995
5. NMEA 0183 Standard for Interfacing Marine Electronic Devices Version 2.0, January 1
1993, Mobile AL, USA.
Terminology
TCP/IP - A name for a suite of protocols used to interconnect computer.
TCP - Transmission Control protocol. IP - Internet Protocol.
MiTS - Maritime Information Technology Standard
Embedded Controller - A microprocessor often used to control or monitor an industrial process.
System bus - A high speed network connecting computers, PCS and workstations in an office environment or in process control environment.
Field bus - A low speed network connecting for example data acquisition units in process control system.
Reliable Stream - connection between two processes where errors never occur and bytes are received in transmitted order.
Companion Standard - the interpretation and identification of specific information entities in a communication protocol
System designs
Two different designs will be discussed. The "typical host based" design
versus a distributed design.
Typical host based design
Consider the figure below. Two embedded controllers are connected to a host computer
using a fieldbus, in this case a multi-drop RS422. The host may be connected to other
peripherals using RS-232.
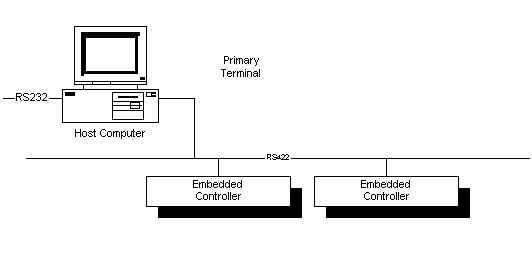
This design is in widely use in the industry today, and many successful applications
are built using this architecture.
Distributed/Integrated design
In the next design, the host is removed. Presentation and storage is separated.
Functionality is distributed.

Discussion of architecture
The host based design is easy to understand and develop but it does not meet the requirements of integration because
- It is difficult to change.
- Proprietary interface protocol is normally in use between host and embedded controller
- Data availability is limited by host computers' data distribution ability and low bandwidth of serial communication
- Design of external interface is dependent on "ad-hoc needs" surfacing after the product has been constructed
The distributed design is more complex and requires more effort in design but new tools and standards are making this architecture feasible. The advantages of such an approach are :
- Process and presentation are separated
- Standards like TCP/IP are used
- High bandwidth on system bus
- User terminals and embedded controllers communicate through well defined interface
- Changes in presentation will not affect process and vice versa.
Conclusion
We believe that a distributed design offers many important advantages supporting what is known to be "good design practices":
- Modularity
- Scalability
- Testability
- Well-defined interface between modules
The embedded TCP/IP approach
The scope for the embedded TCP/IP is to be used in applications for :
- Connecting embedded controllers through TCP/IP to workstations
- Protecting the critical system components from upredictable network access and load
- Connecting laptops to Transputer networks
- Be a cost-effective custom module for low-production volumes
- Network aware embedded controller turnkey systems
- TCP/IP firewall for shielding and controlling access to important networks
- Network connection module for intelligent data acquisition modules
Important features to make this possible are :
- 32 bit microprosessor
- 4-16 Mbyte DRAM
- TCP/IP bootstrap enables network booting of module
The module is in fact a dedicated communication controller where complete communication protocol stacks can be accommodated.
Back grounder
The components required to connect an embedded controller to the system network using TCP/IP is difficult to obtain. It is not possible to go to one vendor and buy a solution. The reasons for this may be that the individual components has been prohibitive by means of complexity, and users do not want to use this advanced approach when serial lines seem to work.
We believe that a common approach to solving this problem is to build a stand-alone embedded controller based on an Intel processor. When the demand of a network connection is raised the straight forward ad-hoc solution is adding a PCMCIA network controller and buy some third party networking software. There are a number of reasons why this approach in many cases will be unsuccessful. Firstly, this is basically the host design replacing the serial line with an network interface. Secondly, the developer will be responsible for integrating the embedded controller, the PCMCIA interface and the third party network software in addition to the task of specifying, implementing, documenting and testing his own application protocol. The work with the application protocol is normally a challenge in itself. Finally, adding a protocol stack to an existing controller may result in unstable/unpredictable operation while communicating. The separation of the primary task for the embedded controller and the secondary task may be to weak and it will be IMPOSSIBLE to guarantee that the primary critical task will run properly.
We believe that many developers will have to learn these facts by failure.
Using the embedded TCP/IP concept the communication module is separated from the
process task. In the block diagram below the difference between the embedded TCP/IP
concept and ad-hoc PC solution is shown.

Idea behind the embedded controller
By providing any embedded controller / micro processor system with a simple electrical interface to an external embedded TCP/IP device, the micro processor system will have access to the system network through a well defined API. This API is implemented using an RPC mechanism over a reliable stream. The API will contain the well known sockets abstraction, meaning that the embedded controller in theory can access any service available on the system network by opening any number of ports, sending/receiving data on the different sockets using TCP or UDP.
Working example based using TCP/IP
A working example may be a motion reference unit connected to a gyro (the motion reference unit may enhance its operation given an external heading reference). The two devices may now be separated by a big distance, still communicate reliably using the sockets abstraction with no additional hardware and software overhead associated with the flexible embedded TCP/IP approach.

Embedded TCP/IP & MiTS
MiTS, Maritime Information Technology Standard
MiTS, Maritime Information Technology
Standard, developed by SINTEF Reguleringsteknikk with support from Norsk
Forskningsråd in cooperation between Autronica AS, Simrad Norge AS, Norcontrol AS,
Kværner og Veritas. The project was started addressing the need for a standarized
communication tool enabling development of integrated ship automation equipment. The
project was launched in 1992. MiTS Forum, Trondheim, Norway is working to establish MiTS
as an international standard.
MiTS Companion Standard
In the MiTS project the Companion Standards were identified to be the most important issue in designing and developing integrated ship control systems. The companion standard defines how the nodes interact using a concise definition. At the moment the MiTS Workgroup is defining the following Companion Standards for use on ships :
- NMEA over MiTS
- Machinery Alarm System
The NMEA over MiTS is an implementation of transport layer of the widely used navigational standard "NMEA 0183 Standard for Interfacing Marine Electronic Devices Version 2.0" [5]. The companion standard for Machinery Alarm System defines the distribution of values and alarms.
Together, these two message classes covers approx. 80% of the messages called for in a maritime information network.
NMEA over MITS
The implications of offering NMEA over MiTS to an embedded TCP/IP client are many. Our
example based on TCP/IP requires some added effort in accommodating the sockets
abstraction handling of connect and disconnect on the network level. The approach of using
the MiTS Protocol and the MiTS Companion Standard and putting the complete implementation
on the embedded TCP/IP module means that the task of connecting a motion reference unit to
a device complying to the NMEA over MiTS is reduced to supporting NMEA over a serial line.
This means that the embedded TCP/IP has made NMEA being distributed on system network
completely transparent to the motion reference unit.

Concluding remarks
The concept of a network building block is needed to build flexible and distributed
networks of embedded controllers and hosts. The components for putting together such a
device are available and off-the shelf.
TORDIVEL AS appreciates receiving statements of interest and
comments.
You are visitor on this page.
| TORDIVEL AS WDM THRANES GATE 77 0175 OSLO TELEFON 2220 68 90 TELEFAX 2315 8701 EMAIL office@tordivel.no |